今日,小米在機器人領域拋出一枚重磅炸彈——小米機器人團隊正式發布并開源全新具身智能VLA模型Xiaomi-Robotics-0,其真機運行畫面首次對外公開,瞬間引發行業高度關注。
長久以來,機器人模型發展面臨諸多阻礙。一方面,傳統VLA模型雖參數規模可觀、泛化能力不錯,但在真實物理世界中,推理延遲高的問題極為突出,導致機器人動作斷斷續續,如同“延遲卡頓的木偶”,難以像人類一樣自然流暢地操作,被網友戲稱為“反應遲鈍的木頭人”。另一方面,具備高性能的模型往往依賴昂貴的專業顯卡才能運行,普通開發者和小團隊根本無力承擔,使得先進技術只能被困在實驗室,無法實現落地普及。不少模型還存在“仿真測試成績優異,一上真機就表現不佳”的尷尬狀況,無法穩定完成疊毛巾、拆積木等真實物理任務,理論與實操嚴重脫節。
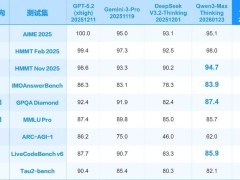
此次小米推出的Xiaomi-Robotics-0模型,正是為解決這些行業難題而來。該模型擁有47億參數規模,兼具視覺語言理解與高性能實時執行能力。在Libero、Calvin、SimplerEnv三大全球主流具身智能測試集里,它對標超過30款主流模型,在所有基準測試中全部斬獲SOTA(State-of-the-Art,即當前公開可驗證的最先進、最高水平),真正實現了“仿真通、真機強、多模態能力不丟失”的重大突破。
Xiaomi-Robotics-0最具顛覆性的亮點在于,它能在普通消費級顯卡上實現實時推理,一舉打破了高端機器人模型“只能實驗室跑、普通人用不起”的困境,大幅降低了具身智能技術的落地門檻。這意味著普通開發者無需斥巨資購買專業顯卡,也能讓模型穩定運行,為更多人參與機器人技術研發提供了可能。
小米能夠實現這一突破,關鍵在于自研的Mixture-of-Transformers(MoT)混合架構。這一架構可看作是為機器人打造的“雙腦協同系統”,兼顧決策與執行效率。其中,視覺語言大腦(VLM)負責理解人類指令和感知環境,即使面對“把毛巾疊好”這類模糊指令,也能精準把握空間關系和任務目標,保留了多模態理解能力,這是此前許多VLA模型所不具備的優勢。動作執行小腦(DiT)則專注于將指令轉化為流暢動作,生成連續的“動作塊”,并通過流匹配技術確保動作精準穩定,讓機器人告別機械卡頓,動作靈活度接近人類,從根源上解決了傳統模型動作斷層的問題。
為了讓機器人既“聰明”又“能干”,小米團隊還設計了獨特的兩階段訓練方案。在第一階段,通過跨模態預訓練,讓模型在學習動作的同時,不丟失物體識別、視覺問答等基礎能力,避免出現“練了手工、廢了腦子”的情況。同時,利用Action Proposal機制使VLM的特征空間與動作空間對齊,為后續實操奠定基礎。在第二階段,通過后訓練優化,采用異步推理模式從機制上解決真機“動作斷層”問題,搭配Clean Action Prefix讓動作軌跡連續不抖動,借助Λ-shape Attention Mask讓機器人聚焦當前視覺反饋、擺脫歷史慣性,即使環境發生變化,也能即時調整,大幅提升環境適配能力。
從曝光的真機視頻中可以直觀看到,Xiaomi-Robotics-0模型在處理不同物體時表現出色。面對軟塌塌的毛巾,它會先鋪平,再對折、整理整齊,對于多余的毛巾還會主動放回原位;面對剛性積木,它能穩妥地一步步拆解,手眼協調極為穩定,不會出現卡頓或失誤。無論是軟質材料還是硬質物件,都能從容應對,充分展現了物理智能真正落地的成果。
值得一提的是,小米此次展現出了強大的格局,將Xiaomi-Robotics-0成果全量開源。技術主頁、GitHub開源代碼、Hugging Face模型權重全部公開,全球開發者都能免費使用、進行二次開發,相關資源可在各大平臺直接獲取。這一舉措徹底打破了大廠對具身智能核心技術的壟斷,讓原本高高在上的具身智能技術真正向行業敞開大門,普通開發者也能參與其中,加速整個行業的技術迭代。
雷軍在微博中透露,小米早已在機器人賽道深度布局,目前仍在全球招募頂尖人才,團隊還在持續沖刺下一代技術。此次發布的Xiaomi-Robotics-0只是階段性研究成果,未來或許還會有更多驚喜等待著我們。