雷軍在微博上宣布,小米機器人團隊正式推出并開源了一款全新的具身智能VLA模型——Xiaomi-Robotics-0,同時首次公開了該模型在真實機器人上的運行畫面。這一發布標志著小米在機器人領域邁出了重要一步,解決了多項行業長期存在的技術難題。
Xiaomi-Robotics-0擁有47億參數,集成了視覺語言理解與高性能實時執行能力。該模型在三大主流仿真測試中表現優異,全面超越行業標桿,取得全項SOTA成績。更令人矚目的是,它在真實機器人上實現了流暢的動作表現,徹底改變了傳統機器人動作卡頓、反應遲緩的形象。
傳統VLA模型面臨兩大核心挑戰:一是推理延遲高導致動作不連貫,二是依賴昂貴專業顯卡,硬件門檻高。這些問題使得先進機器人技術難以走出實驗室,無法在現實場景中廣泛應用。Xiaomi-Robotics-0通過創新設計,成功突破了這些限制。
該模型最大的突破在于能在普通消費級顯卡上實現實時推理,大幅降低了技術落地成本。這一特性使其區別于同類產品,為更多開發者和研究機構提供了接觸前沿技術的機會。小米通過自研的Mixture-of-Transformers混合架構,為機器人構建了"雙腦協同系統",有效解決了傳統模型存在的效率問題。
這個雙腦系統由視覺語言大腦(VLM)和動作執行小腦(DiT)組成。VLM負責理解人類指令和環境信息,能夠準確解析模糊指令中的空間關系和任務目標;DiT則專注于將指令轉化為流暢動作,通過流匹配技術確保動作精準穩定。這種設計使機器人動作更加自然,接近人類操作水平。
研發團隊采用兩階段訓練方案提升模型性能。第一階段通過跨模態預訓練,使模型在掌握動作技能的同時保持基礎認知能力;第二階段通過后訓練優化,解決真機運行中的動作斷層問題。這些技術改進使機器人能夠穩定完成疊毛巾、拆積木等復雜物理任務。
從公開的真機演示視頻可以看到,機器人處理柔性物體時表現出色,能夠自動調整動作策略完成疊放任務;操作剛性積木時手眼協調穩定,動作精準無誤。這種對不同材質物體的適應能力,展現了模型強大的物理智能和環境感知能力。
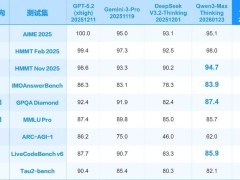
在Libero、Calvin、SimplerEnv等國際主流測試集中,Xiaomi-Robotics-0與超過30款主流模型對標,在所有基準測試中均取得最優成績。這些數據證實了該模型在仿真環境和真實場景中的全面領先地位。
小米此次選擇將技術成果全量開源,包括技術文檔、GitHub代碼和Hugging Face模型權重全部公開。這一舉措打破了行業技術壁壘,使全球開發者都能免費使用和二次開發相關資源,將加速具身智能技術的普及和應用創新。
雷軍透露,小米已持續多年布局機器人領域,目前仍在全球招募頂尖人才。此次發布的Xiaomi-Robotics-0只是階段性成果,團隊正在攻關下一代技術,未來將帶來更多創新突破。